
从0入门自主空中机器人-2-2【无人机硬件选型-PX4篇】

从0入门自主空中机器人-2-2【无人机硬件选型-PX4篇】
MGodmonkey1. 常用资料以及官方网站
无人机飞控PX4用户使用手册(无人机基本设置、地面站使用教程、软硬件搭建等):https://docs.px4.io/main/en/
PX4固件开源地址:https://github.com/PX4/PX4-Autopilot
飞控硬件、数传模块、GPS、分电板等—holybro官网:http://www.holybro.com/
无人机动力系统–TMotor官网:https://uav-cn.tmotor.com/
无人机在线课程、开源项目—阿木实验室:https://amovlab.com/
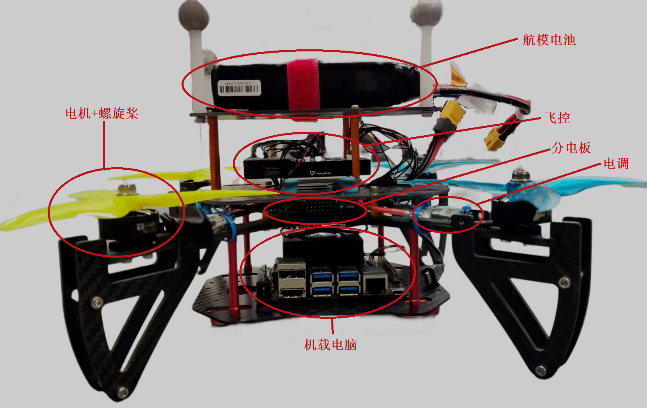
2. 机架推荐/可二次开发整机无人机
3. 无人机各个重要模块功能及选型
3.1 航模电池

- 主要的参数及选型推荐
| 参数 | 说明 | 推荐值 |
|---|---|---|
| 容量 | 电池容量,表示电池可以放出的电量多少,以mh为单位 | 5000mAH |
| 电芯节数 | 电芯数量,决定了电池输出电压大小。通常有3S,4S,6S等,如4S电池代表一块电池内有4块电芯,4块电芯串联输出,每个电芯最高输出电压4.2V,则该电池最终最大输出16.8V | 4S |
| 放电倍率 | 电池的倍率特性是指的电池的充放电性能,倍率越高的能够承受的放电电流就越大,倍率的单位是C | 50c/60c |
| 接口 | 电池输出接口,通常有XT60,XT40,T插等 | XT60 |
推荐淘宝链接:【前往】
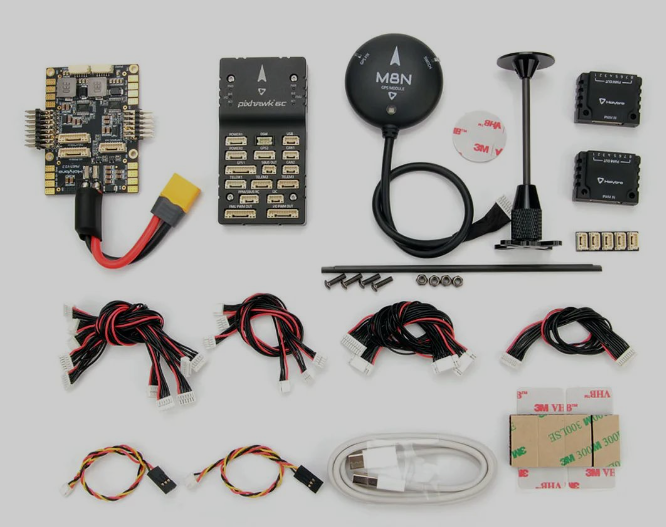
3.2 飞控

- 介绍
**飞控:**飞行控制器,用于飞行器底层控制,如无人机姿态、高度以及位置等。同时也可以连接传感器以及其它模块,如GPS、遥控器接收机以及数传等。
3.3 分电板
- 介绍
**分电板:**分电板的作用是将电池供电分配给四个电调,并且将飞控的控制信号传递给电调。
3.4 电调
- 介绍
**电调:**接收控制指令并控制电机旋转。
- 说明
电调有分体式和四合一两种型号,四合一顾名思义就是将四个分体式电调整合在一块PCB板上,四合一电调常用于穿越机上,这里所组装的四旋翼无人机推荐使用分体式电调。

选型推荐
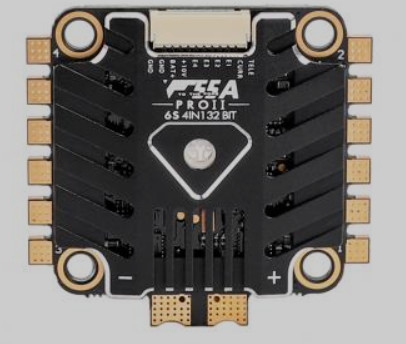
选型推荐
型号:F55A PRO 6S 4IN1
使用说明:【前往】
推荐淘宝链接:【T-MOTOR 老虎动力】穿越机 航模电调 2代 F55A PROⅡ 6S 4IN1-淘宝网 (taobao.com)
3.5 电机

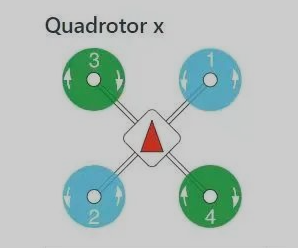
3.6 螺旋桨
四旋翼飞机螺旋桨安装方向如下图所示,在安装时,螺旋桨厚的一面在旋转方向的前方:
3.7 数传

- 介绍
**数传:**用于无人机和地面站( http://qgroundcontrol.com/ )进行实时通讯,在飞行时传递无人机电量、飞行姿态、GPS位置等信息。
选型推荐
型号:SiK Telemetry Radio V3
使用说明:【前往】
推荐淘宝链接:【前往】
3.8 遥控器及接收机

- 选型推荐
- 型号:天地飞ET16S
推荐淘宝链接:【前往】
3.9 机载电脑(可选)
Intel NUC(推荐)、Jetson Tx2,树莓派。用于无人机感知、路径规划等算法运算,向飞控发送指令。
4. 其它无人机散件及选型
桨保:保护桨叶在碰撞时不会折坏。
- 参考:【淘宝链接】
尼龙柱:用于固定机载电脑及其它模块。
- 参考:【淘宝链接】
铝柱:用于连接无人机上下两层。
- 参考:【淘宝链接】
减震球:用于降低在飞行时飞控模块的震动频率,保护其中的IMU。
- 参考:【淘宝链接】
锂电池充电器:
- 参考:【淘宝链接】
电池绑带:
- 参考:【淘宝链接】
强力背胶魔术贴:用于固定电池。
- 参考:【淘宝链接】
稳压模块:用于机载电脑和部分传感器的供电。
- 参考:【淘宝链接】
本文参考自微信公众号:【交流分享】无人机资料汇总及选型推荐–PX4系列 (qq.com)














